A prototype 2nd-order system has the form:
By the quadratic formula, the poles are:
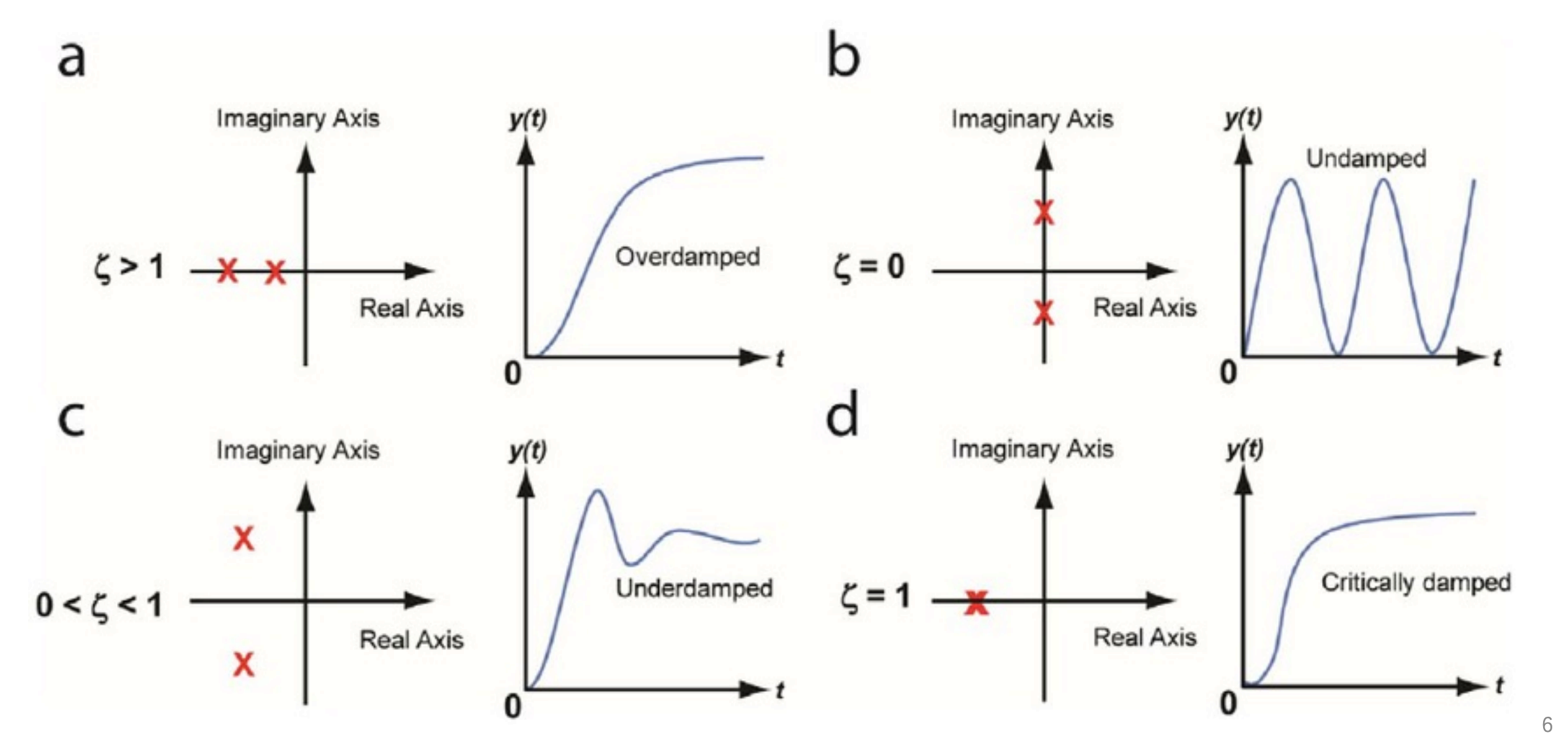
The nature of the poles depends on :
- means both poles are real and negative
- means one negative pole
- means two complex poles with negative real parts
In general, the poles take the form:
where and (damped frequency).
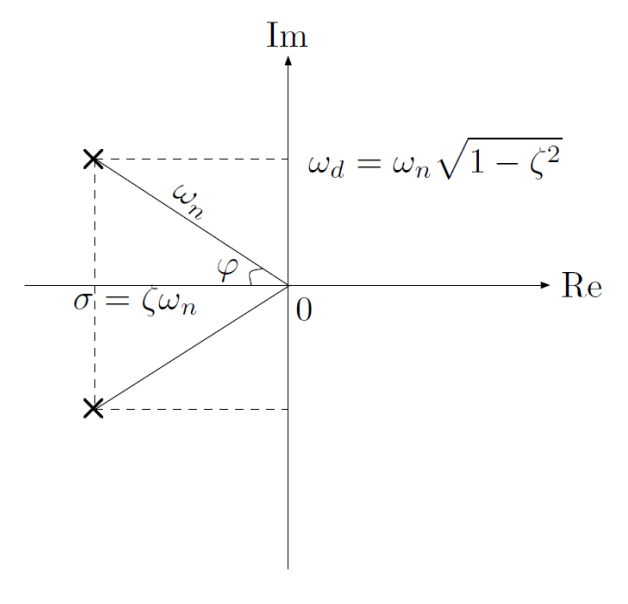
Note that
and
2nd-Order Response
Let’s compute the system’s impulse and step response:
Impulse response
Step response
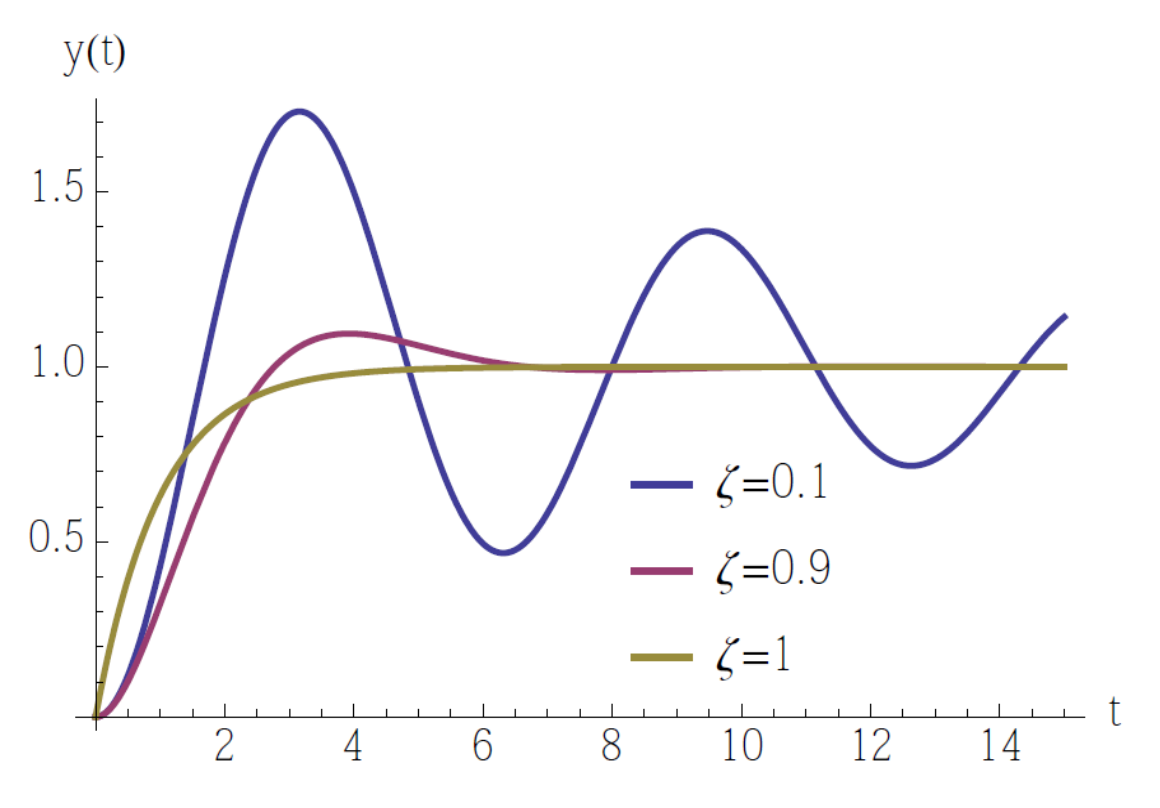
We can see the variation in behavior with respect to the here: