Stepper motor is operated by pulses:
- Typically runs by two signals: step pulses and direction
- There is a small transient motion at each step
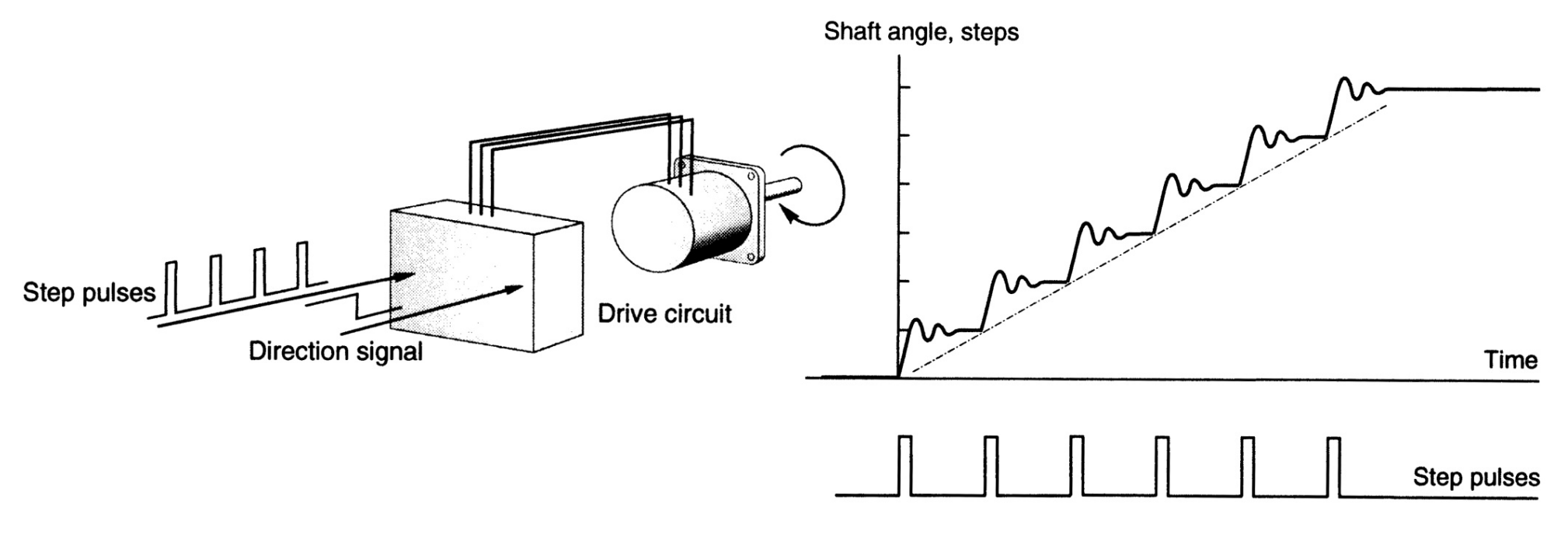
Stepper motor is operated in discrete mode:
- The load torque results in some position error
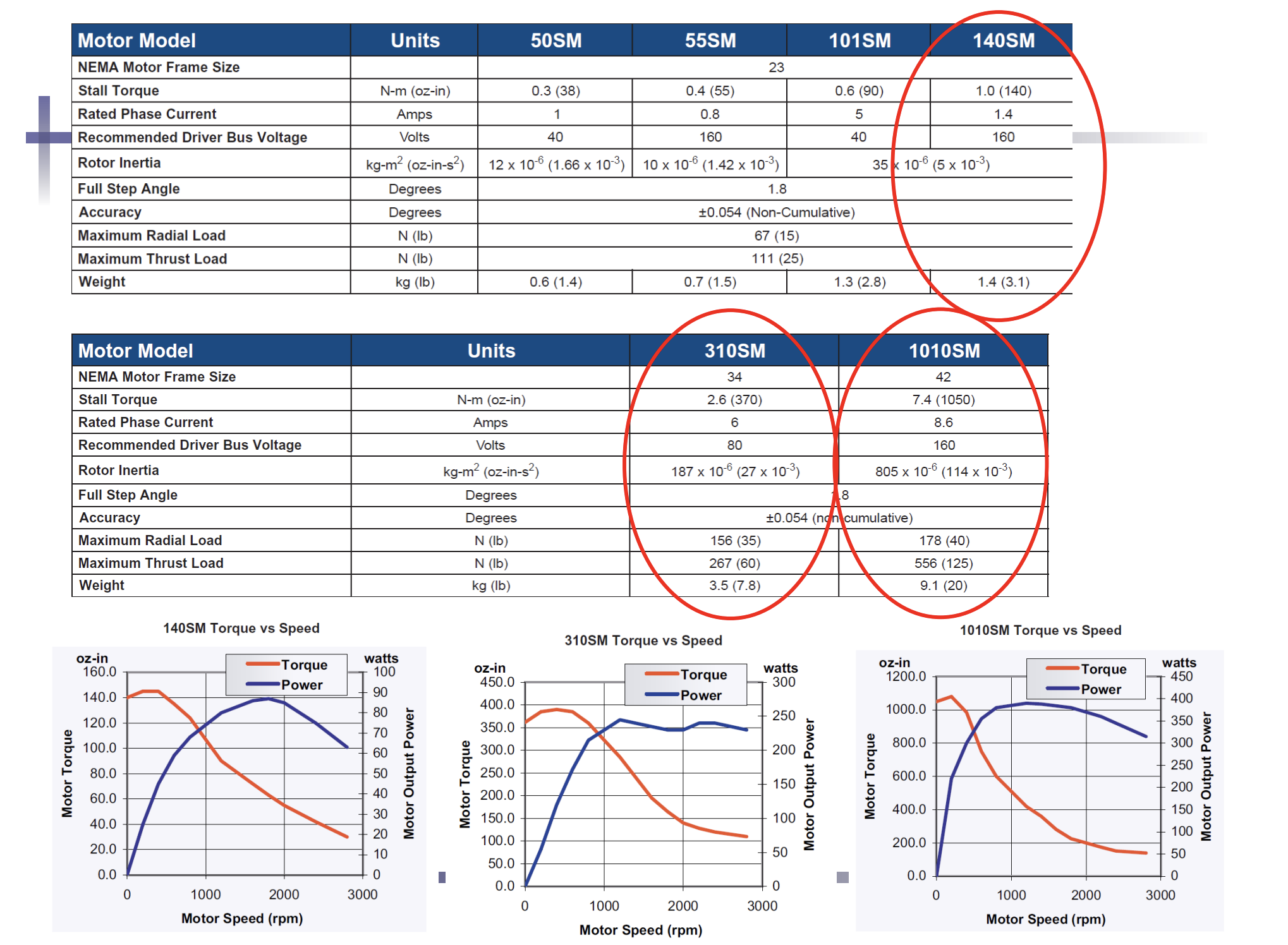
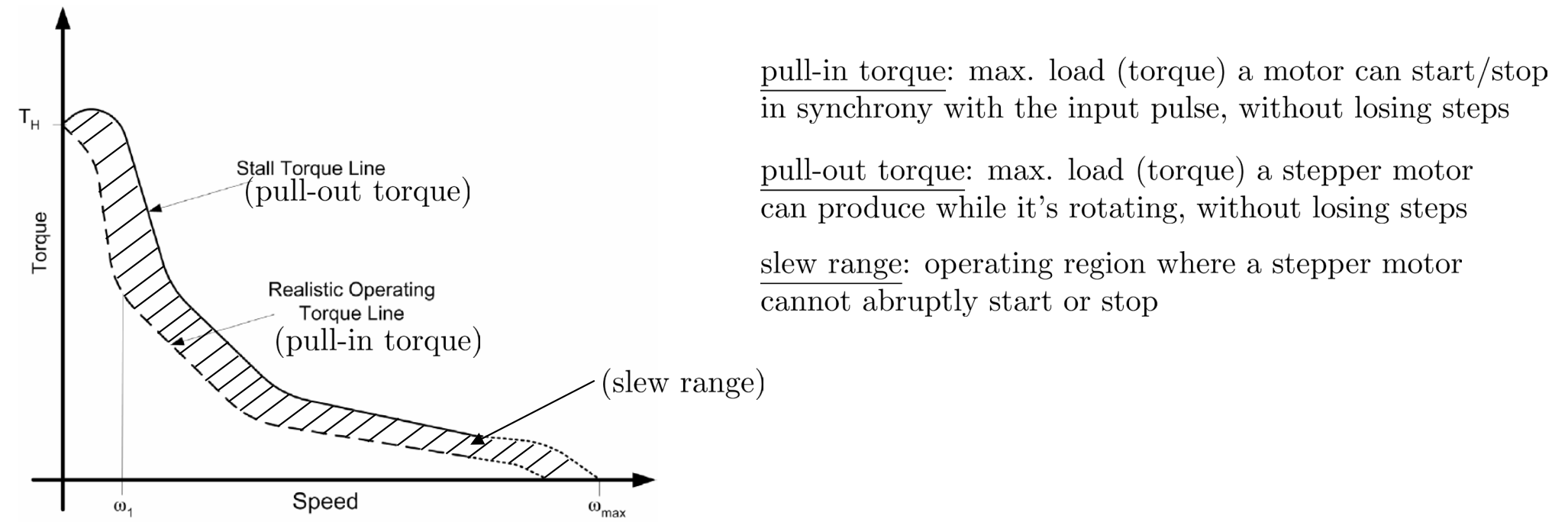
Stepper Motor Torque-Speed Curve
Totally different from servo motors (DC, BLDC):
- Torque drastically decrease as speed increases
- Typical speed ranges from 100 to 1000 rpm
- Difficult to establish distinct rated torque or speed
Example: Stepper Motor Selection
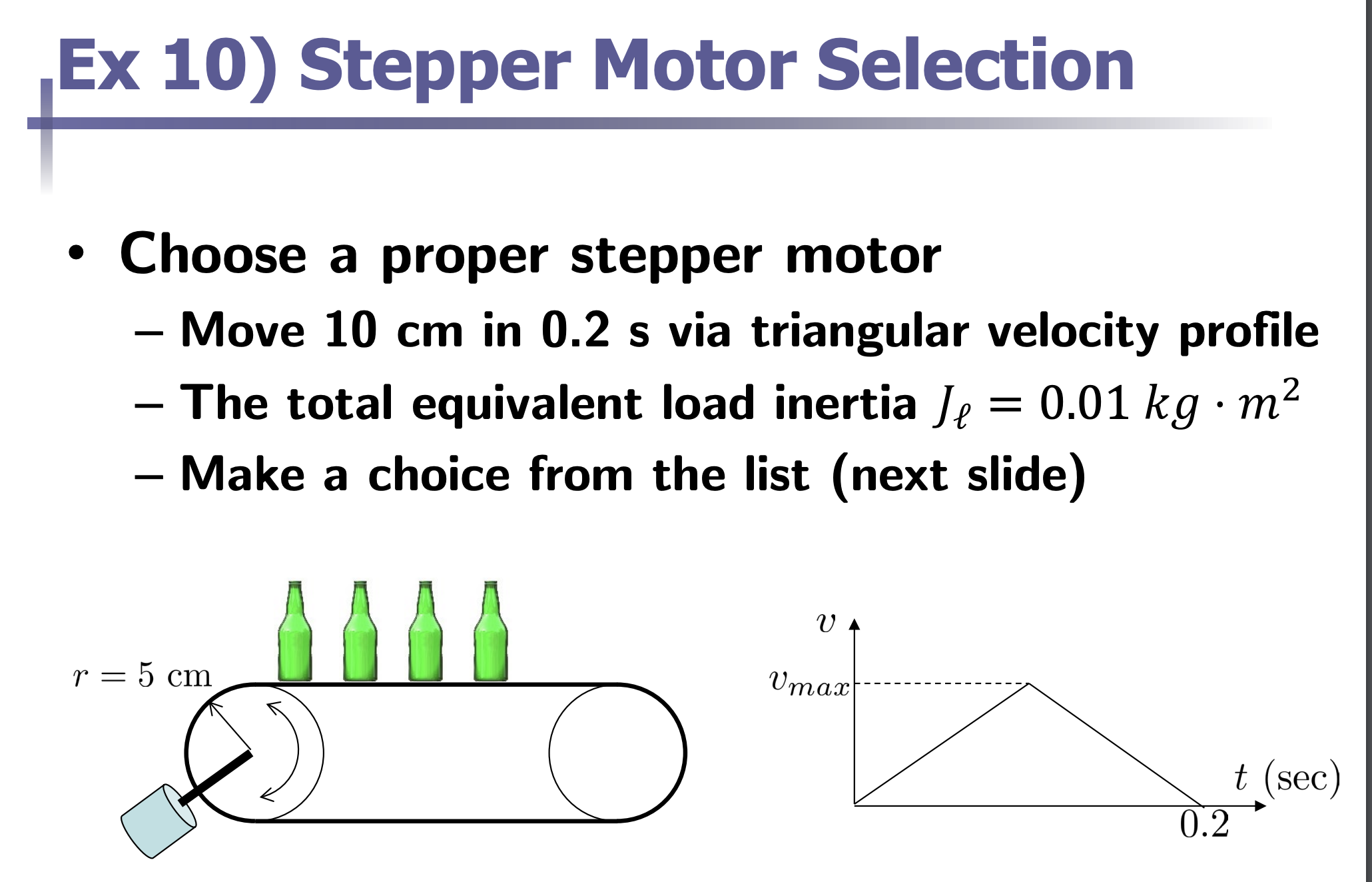
From the velocity profile:
Max acceleration/deceleration:
Angular acceleration/deceleration:
Require motor torque:
Note that is very small compared to , so it can be ignored. Thus, we have:
From the torque-speed curve (pull-out torque):
| Model | Torque @ |
|---|---|
| 140 SM | 142 |
| 310 SM | 370 |
| 1010 SM | 1050 |
Therefore, the 310 SM will be suitable.